エスカレーターのデバッグを行う前に、2つの主駆動輪速度センサーと主駆動輪の歯の間の距離が2mm~3mmであること、および2つの主駆動輪速度センサー間の中心距離が40±1mmであることを保証する必要があります。主駆動輪が回転すると、速度センサーは速度パルスを感知して生成することができ、同時にセンサープローブが主駆動輪によって損傷を受けることはありません。実際の設置工程では、センサーの検出精度に影響を与えないように、センサー表面に油が付着していないことを確認する必要があります。
メインドライブセンサーの取り付け図を以下に示します。
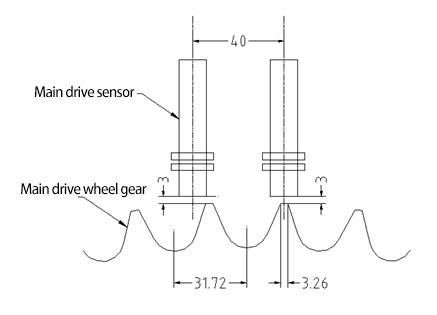
メインドライブセンサーの取り付け寸法
主駆動センサーを設置した後、自己学習前の保守作業中に、M2-1-1-5メニューインターフェースを介して2つの主駆動センサーのパルスを監視できます。ラダーの通常速度は0.5m / sと0.65m / Sです。フィードバック速度パルスは14〜25Hz、AB位相の通常位相角は70°〜110°です。速度パルスとAB位相の位相角が範囲内になく、アップリンク位相角とダウンリンク位相角の差が30°を超える場合は、センサーの取り付け位置を調整してください。理論上の要件については、図5を参照してください。エスカレーターが0.5m / sの速度で走行している場合、サーバー監視インターフェースの主駆動値は次のように表示されます。
SPD1(主駆動速度センサー1)とSPD2(主駆動速度センサー2)の実際の表示値は、エレベーター全体のさまざまなパラメータに応じて変化します。
エスカレーターの通常運転前のデバッグ
自習機能の説明:
新規格IECBでは、MSCB多機能安全制御盤にSP、MSD、HRS、PSDの自己学習機能が追加されました。自己学習により、SP、MSD、HRS、PSDの値を故障判定の基準として取得できます。M2-1-5を押してパスワードを入力した後、M2-1-4を押して自己学習インターフェースに入ります。自己学習インターフェースに入ったら、確認キーを押して自己学習状態に入ります。MSCB多機能安全制御盤の自己学習機能には、以下の点が含まれます。
1. 自己学習が完了するまでエスカレーターは正常に動作しません。エスカレーターは、点検を受け、電源周波数の状態で上昇させた場合にのみ、自己学習に成功します。
2. 自己学習機能開始後、エスカレーターの状態が安定するまで10秒間待機し、10秒間はエスカレーターの運転状態を検出できません。電源周波数が10秒間維持された後にのみ、自己学習状態に移行できます。自己学習が完了すると、エスカレーターは停止し、その後正常に運転できます。
3. 自己学習が完了すると、自己学習値とベンチマーク値がプログラム内で比較され、自己学習値が正しいかどうかが判断されます。
4. 自己学習時間は30秒~60秒です。60秒経過しても自己学習が完了しない場合は、自己学習がタイムアウトした、つまり自己学習に失敗したと判断されます。
5. 自己学習開始前の速度異常は、自己学習中に判断することはできません。自己学習が完了した後にのみ判断できます。
6.自己学習プロセス中の速度異常は5秒以内に判定され、エスカレーターは緊急に走行を停止し、MSCB多機能安全制御盤上の安全回路リレーSCが切断されます。
7. 自己学習により、SP1 と SP2 間の位相差の要件が追加され、SP1 と SP2 間の位相差は 45° ~ 135° の範囲でなければなりません。
自己学習型操作プロセス:
| 手順 | サーバー表示 | ||
| 1 | 制御盤の下部レールにある端子601と602の短い配線を引き出します。 | ||
| 2 | IECBを電力周波数動作状態に設定する | ||
| 3 | M2-1-5を押してパスワードメニューに入ります | パスワード:9999 | パスワードを入力してください |
| 4 | M2-1-2-2を押して工場出荷時設定へのリセットインターフェースに入ります | 履歴書工場 Enter キーを押してください... | |
| 6 | 工場出荷時の設定に戻すには、Shift+Enter キーを押します。 | 履歴書を肯定する Enter キーを押してください... | |
| 7 | 工場出荷時の設定に戻すには、Shift+Enter キーを押します。 | 再開工場大成功! | |
| 8 | M2-2-5を押してパスワードメニューに入ります | パスワード:9999 | パスワードを入力してください |
| 9 | M2-2-2-2を押して工場出荷時設定へのリセットインターフェースに入ります | 履歴書工場 Enter キーを押してください... | |
| 10 | Shiftキー+Enterキーを押して工場出荷時の設定に戻します | 履歴書を肯定する Enter キーを押してください... | |
| 11 | Shiftキー+Enterキーを押して工場出荷時の設定に戻します | 再開工場大成功! | |
| 12 | M2-1-2-1を押してパラメータ設定インターフェースに入ります | ||
| 13 | エスカレーターの速度ステップSPFを設定する | 実際のラダータイプに応じて設定 | |
| 14 | ステップ幅を設定する ステップ幅 | 実際のラダータイプに応じて設定 | |
| 15 | サービスプラグを挿入する | ||
| 16 | M2-1-4を押して自己学習インターフェースに入ります | パラ。 ラーニングプレス | |
| 17 | Shiftキー+Enterキーを押して自己学習状態に入ります | 検査ボックスでEscキーを押して起動 | |
| 18 | メンテナンス アップリンクを開始し、自己学習の成功または失敗が表示されるまで実行を続けます。 | 自己学習失敗の障害については表3を参照してください。トラブルシューティング後、自己学習を再開してください。自己学習が成功または失敗した場合は、IECBを周波数変換状態に設定してください。 | |
表7. 自己学習に失敗した場合のトラブルシューティング。自己学習に失敗した場合は、サーバーに表示される障害コードに従ってトラブルシューティングを行ってください。詳細なトラブルシューティングについては、表7を参照してください。トラブルシューティング後、再度自己学習を行う必要があります。
| シリアルナンバー | 異常状態 | サーバー障害表示 | トラブルシューティング |
| 1 | 異常状態 SP値が14~25HZの範囲外です | SPF | M2-1-2-1のステップ速度SPFとステップ幅を確認し、SP1とSP2のセンサーの取り付けが要件を満たしているかどうかを確認します。 |
| 2 | AB相間の位相差(SP1はA相、SP2はB相)が45°~135°の範囲外である | SPF | SP1およびSP2センサーの設置が要件を満たしているかどうかを確認する |
| 3 | MSD1 上部の段が欠落しています | B25 | 上段ステップセンサーが正しく取り付けられているか確認してください |
| 4 | MSD2 下段が欠落しています | B25 | ステップセンサーが正しく取り付けられているか確認してください |
| 5 | HDR値とHL値の偏差が10%を超えるか、自己学習プロセス中にパルス変異が発生する | B9 | 右のアームレストセンサーが正しく取り付けられているかどうかを確認します |
| 6 | HL値とHR値の偏差が10%を超えるか、自己学習プロセス中にパルス変異が発生する | B8 | 左アームレストセンサーが正しく取り付けられているかどうかを確認します |
8.3 CHK自己学習完了後の自己テスト
自己学習が完了したら、非保守プラグを差し込み、キースイッチを使用してエスカレーターを通常通り起動し、エスカレーターのセルフテスト操作を実行します。セルフチェック操作中、エスカレーターは2分間連続して動作します。この2分間、セルフスタート機能は一時的に無効になり、エスカレーターのすべての障害保護がチェックされます。セルフチェック中に障害が見つからない場合、自動的に通常の動作に戻ります。エスカレーターを再起動する必要はありません。障害が見つかった場合、エスカレーターは動作を停止し、対応する障害を表示します。一般的な障害は、制御盤のドアの内壁にあります。トラブルシューティング後、再度セルフチェックを行う必要があります。キースイッチボックスには、セルフチェックごとにCHKが表示されます。
エスカレーターは、メンテナンス状態から通常状態に移行するたびに自己点検状態に入ります。自己点検中は、まずキースイッチボックスがCHK(チェック)を実行し、交通流信号灯が消灯します。
投稿日時: 2023年10月24日