ກ່ອນທີ່ຈະ debugging escalator ໄດ້, ມັນຕ້ອງໄດ້ຮັບການຢືນຢັນວ່າໄລຍະຫ່າງລະຫວ່າງສອງເຊັນເຊີຄວາມໄວລໍ້ຂັບລົດຕົ້ນຕໍແລະແຂ້ວລໍ້ຂັບລົດຕົ້ນຕໍແມ່ນ 2mm-3mm, ແລະໄລຍະຫ່າງສູນກາງລະຫວ່າງສອງເຊັນເຊີຄວາມໄວລໍ້ຕົ້ນຕໍຄວນຈະໄດ້ຮັບການຮັບປະກັນ 40 ± 1mm. ເມື່ອລໍ້ຂັບຕົ້ນຕໍຫມຸນ, ເຊັນເຊີຄວາມໄວສາມາດຮັບຮູ້ແລະສ້າງກໍາມະຈອນຄວາມໄວ, ແລະໃນເວລາດຽວກັນ, ເຊັນເຊີ probe ຈະບໍ່ເສຍຫາຍໂດຍລໍ້ຂັບຕົ້ນຕໍ. ໃນລະຫວ່າງຂະບວນການຕິດຕັ້ງຕົວຈິງ, ມັນຈໍາເປັນຕ້ອງຮັບປະກັນວ່າບໍ່ມີນ້ໍາມັນຢູ່ໃນຫນ້າຂອງເຊັນເຊີເພື່ອຫຼີກເວັ້ນການຜົນກະທົບຕໍ່ຄວາມຖືກຕ້ອງຂອງການກວດສອບຂອງເຊັນເຊີ.
ແຜນວາດການຕິດຕັ້ງເຊັນເຊີໄດຫຼັກແມ່ນສະແດງຢູ່ຂ້າງລຸ່ມນີ້.
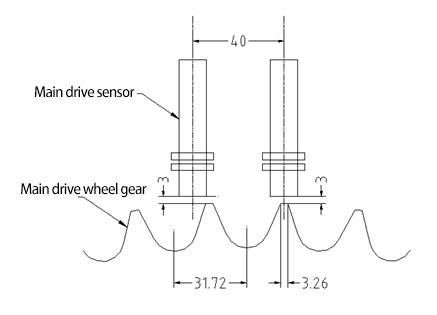
ຂະໜາດການຕິດຕັ້ງເຊັນເຊີໄດຫຼັກ
ຫຼັງຈາກເຊັນເຊີໄດຫຼັກຖືກຕິດຕັ້ງ, ໃນລະຫວ່າງການປະຕິບັດການບໍາລຸງຮັກສາກ່ອນທີ່ຈະຮຽນຮູ້ດ້ວຍຕົນເອງ, ກໍາມະຈອນຂອງສອງເຊັນເຊີໄດຕົ້ນຕໍສາມາດຕິດຕາມໄດ້ໂດຍຜ່ານການໂຕ້ຕອບເມນູ M2-1-1-5, ແລະ ladders ທີ່ມີຄວາມໄວປົກກະຕິຂອງ 0.5m / s ແລະ 0.65m / S, ຄວາມໄວຄໍາຄຶດຄໍາເຫັນແມ່ນລະຫວ່າງ 14 ແລະ 25HZ, ແລະໄລຍະ 10 ° AB °ປົກກະຕິ. ຖ້າມຸມໄລຍະລະຫວ່າງຄວາມໄວຂອງກໍາມະຈອນແລະໄລຍະ AB ບໍ່ຢູ່ໃນຂອບເຂດ, ແລະຄວາມແຕກຕ່າງກັນລະຫວ່າງມຸມໄລຍະ uplink ແລະ downlink ແມ່ນຫຼາຍກ່ວາ 30 °, ກະລຸນາປັບຕໍາແຫນ່ງການຕິດຕັ້ງເຊັນເຊີ. ເບິ່ງຮູບ 5 ສໍາລັບຄວາມຕ້ອງການທາງທິດສະດີ. ເມື່ອ escalator ແລ່ນດ້ວຍຄວາມໄວ 0.5m / s, ມູນຄ່າການຂັບລົດຕົ້ນຕໍໃນການໂຕ້ຕອບການກວດສອບເຄື່ອງແມ່ຂ່າຍຈະສະແດງດັ່ງຕໍ່ໄປນີ້:
ຄ່າການສະແດງຕົວຈິງຂອງ SPD1 (ເຊັນເຊີຄວາມໄວໄດຫຼັກ 1) ແລະ SPD2 (ເຊັນເຊີຄວາມໄວໄດຫຼັກ 2) ຈະປ່ຽນແປງຕາມຕົວກໍານົດການທີ່ແຕກຕ່າງກັນຂອງລິຟທັງໝົດ.
Debugging ກ່ອນການດໍາເນີນງານປົກກະຕິຂອງ escalator
ລາຍລະອຽດຫນ້າທີ່ການສຶກສາດ້ວຍຕົນເອງ:
ໃນມາດຕະຖານໃຫມ່ IECB, ກະດານຄວບຄຸມຄວາມປອດໄພຫຼາຍຫນ້າທີ່ MSCB ເພີ່ມຟັງຊັນການຮຽນຮູ້ດ້ວຍຕົນເອງສໍາລັບ SP, MSD, HRS, ແລະ PSD. ໂດຍຜ່ານການຮຽນຮູ້ດ້ວຍຕົນເອງ, ຄຸນຄ່າຂອງ SP, MSD, HRS, ແລະ PSD ສາມາດໄດ້ຮັບເປັນພື້ນຖານສໍາລັບການຕັດສິນຄວາມຜິດ. ຫຼັງຈາກກົດ M2-1-5 ເພື່ອໃສ່ລະຫັດຜ່ານ, ກົດ M2-1-4 ເພື່ອເຂົ້າໄປໃນການໂຕ້ຕອບການຮຽນຮູ້ດ້ວຍຕົນເອງ. ຫຼັງຈາກເຂົ້າໄປໃນການໂຕ້ຕອບການຮຽນຮູ້ດ້ວຍຕົນເອງ, ກົດປຸ່ມຢືນຢັນເພື່ອເຂົ້າສູ່ສະຖານະການການຮຽນຮູ້ດ້ວຍຕົນເອງ. ຟັງຊັນການຮຽນຮູ້ດ້ວຍຕົນເອງຂອງແຜງຄວບຄຸມຄວາມປອດໄພຫຼາຍຫນ້າທີ່ MSCB ປະກອບມີຈຸດດັ່ງຕໍ່ໄປນີ້:
1. escalator ບໍ່ສາມາດເຮັດວຽກໄດ້ເປັນປົກກະຕິກ່ອນທີ່ຈະຮຽນຮູ້ດ້ວຍຕົນເອງສໍາເລັດ. escalator ພຽງແຕ່ສາມາດປະສົບຜົນສໍາເລັດໃນການຮຽນຮູ້ດ້ວຍຕົນເອງໃນເວລາທີ່ມັນໄດ້ຖືກກວດກາແລະຍ້າຍຂຶ້ນພາຍໃຕ້ສະຖານະຄວາມຖີ່ພະລັງງານ.
2. ຫຼັງຈາກເລີ່ມຕົ້ນຟັງຊັນການຮຽນຮູ້ດ້ວຍຕົນເອງ, ຈະມີເວລາສະຖຽນລະພາບ 10S ສໍາລັບສະຖານະ escalator, ແລະສະຖານະການເຮັດວຽກຂອງ escalator ຈະບໍ່ຖືກກວດພົບພາຍໃນ 10S. ສະຖານະການຮຽນຮູ້ດ້ວຍຕົນເອງສາມາດເຂົ້າໄດ້ຫຼັງຈາກ 10 ວິນາທີຂອງການບໍາລຸງຮັກສາຄວາມຖີ່ພະລັງງານ. ຫຼັງຈາກການຮຽນຮູ້ດ້ວຍຕົນເອງສໍາເລັດແລ້ວ, escalator ຈະຢຸດແລ່ນ, ແລະຫຼັງຈາກນັ້ນ escalator ສາມາດເຮັດວຽກໄດ້ເປັນປົກກະຕິ.
3. ຫຼັງຈາກການຮຽນຮູ້ດ້ວຍຕົນເອງສຳເລັດແລ້ວ, ມູນຄ່າການຮຽນຮູ້ດ້ວຍຕົນເອງຈະຖືກປຽບທຽບກັບຄ່າ benchmark ພາຍໃນໂປຣແກຣມເພື່ອກຳນົດວ່າຄ່າຂອງການຮຽນຮູ້ດ້ວຍຕົນເອງຖືກຕ້ອງຫຼືບໍ່.
4. ເວລາຮຽນດ້ວຍຕົນເອງແມ່ນ 30S-60S. ຖ້າການຮຽນຮູ້ດ້ວຍຕົນເອງບໍ່ສໍາເລັດຫຼັງຈາກ 60S, ມັນຖືກຕັດສິນວ່າການຮຽນຮູ້ດ້ວຍຕົນເອງໄດ້ຫມົດເວລາ, ນັ້ນແມ່ນ, ການຮຽນຮູ້ດ້ວຍຕົນເອງລົ້ມເຫລວ.
5. ຄວາມຜິດປົກກະຕິຂອງຄວາມໄວກ່ອນທີ່ຈະເລີ່ມຕົ້ນການຮຽນຮູ້ດ້ວຍຕົນເອງບໍ່ສາມາດຖືກຕັດສິນໃນລະຫວ່າງຂະບວນການຮຽນຮູ້ດ້ວຍຕົນເອງ. ມັນພຽງແຕ່ສາມາດຕັດສິນໄດ້ຫຼັງຈາກການຮຽນຮູ້ດ້ວຍຕົນເອງສໍາເລັດ.
6. ຄວາມຜິດປົກກະຕິກ່ຽວກັບຄວາມໄວໃນລະຫວ່າງຂະບວນການຮຽນຮູ້ດ້ວຍຕົນເອງສາມາດກໍານົດໄດ້ພາຍໃນ 5 ວິນາທີ, escalator ຢຸດແລ່ນຢ່າງຮີບດ່ວນ, ແລະວົງຈອນຄວາມປອດໄພ Relay SC ໃນກະດານຄວບຄຸມຄວາມປອດໄພຂອງ MSCB multi-function ແມ່ນຕັດການເຊື່ອມຕໍ່.
7. ການຮຽນຮູ້ດ້ວຍຕົນເອງເພີ່ມຄວາມຕ້ອງການສໍາລັບຄວາມແຕກຕ່າງໄລຍະລະຫວ່າງ SP1 ແລະ SP2, ເຊິ່ງຮຽກຮ້ອງໃຫ້ຄວາມແຕກຕ່າງໄລຍະລະຫວ່າງ SP1 ແລະ SP2 ຕ້ອງຢູ່ລະຫວ່າງ 45° ~ 135°.
ຂະບວນການປະຕິບັດການຮຽນຮູ້ດ້ວຍຕົນເອງ:
| ຂັ້ນຕອນ | ການສະແດງເຊີບເວີ | ||
| 1 | ດຶງສາຍສັ້ນຂອງ terminals 601 ແລະ 602 ອອກຢູ່ທາງລົດໄຟລຸ່ມຂອງຕູ້ຄວບຄຸມ | ||
| 2 | ຕັ້ງຄ່າ IECB ເພື່ອພະລັງງານສະຖານະການດໍາເນີນງານຄວາມຖີ່ | ||
| 3 | ກົດ M2-1-5. ໃສ່ເມນູລະຫັດຜ່ານ | ລະຫັດຜ່ານ: 9999 | ໃສ່ລະຫັດຜ່ານ |
| 4 | ກົດ M2-1-2-2 ເພື່ອເຂົ້າສູ່ການໂຕ້ຕອບການຕັ້ງໂຮງງານຜະລິດຄືນໃຫມ່ | ສືບຕໍ່ໂຮງງານ ກົດ Enter... | |
| 6 | ກົດ SHIFTKEY+ENTER ເພື່ອຟື້ນຟູການຕັ້ງຄ່າໂຮງງານ | ຢືນຢັນ Resume ກົດ Enter... | |
| 7 | ກົດ SHIFTKEY+ENTER ເພື່ອຟື້ນຟູການຕັ້ງຄ່າໂຮງງານ | ສືບຕໍ່ສຳເລັດໂຮງງານ! | |
| 8 | ກົດ M2-2-5 ເພື່ອເຂົ້າໄປໃນເມນູລະຫັດຜ່ານ | ລະຫັດຜ່ານ: 9999 | ໃສ່ລະຫັດຜ່ານ |
| 9 | ກົດ M2-2-2-2 ເພື່ອເຂົ້າສູ່ການໂຕ້ຕອບການຕັ້ງໂຮງງານຜະລິດຄືນໃຫມ່ | ສືບຕໍ່ໂຮງງານ ກົດ Enter... | |
| 10 | ກົດ SHIFT KEY+ENTER ເພື່ອຟື້ນຟູການຕັ້ງຄ່າໂຮງງານ | ຢືນຢັນ Resume ກົດ Enter... | |
| 11 | ກົດ SHIFT KEY+ENTER ເພື່ອຟື້ນຟູການຕັ້ງຄ່າໂຮງງານ | ສືບຕໍ່ສຳເລັດໂຮງງານ! | |
| 12 | ກົດ M2-1-2-1 ເພື່ອເຂົ້າໄປໃນການໂຕ້ຕອບການຕັ້ງຄ່າພາລາມິເຕີ | ||
| 13 | ຕັ້ງຄວາມໄວຂັ້ນໄດເລື່ອນ SPF | ກໍານົດຕາມປະເພດ ladder ຕົວຈິງ | |
| 14 | ກໍານົດຄວາມກວ້າງຂອງຂັ້ນຕອນຂັ້ນຕອນ | ກໍານົດຕາມປະເພດ ladder ຕົວຈິງ | |
| 15 | ໃສ່ປລັກບໍລິການ | ||
| 16 | ກົດ M2-1-4 ເພື່ອເຂົ້າສູ່ການໂຕ້ຕອບການຮຽນຮູ້ດ້ວຍຕົນເອງ | ພາຣາ. ຂ່າວສານການຮຽນຮູ້ | |
| 17 | ກົດ SHIFT KEY+ENTER ເພື່ອເຂົ້າສູ່ສະຖານະການຮຽນຮູ້ດ້ວຍຕົນເອງ | ເລີ່ມ esc ຂຶ້ນໂດຍ Inspection Box | |
| 18 | ເລີ່ມຕົ້ນການເຊື່ອມຕໍ່ uplink ບໍາລຸງຮັກສາແລະສືບຕໍ່ດໍາເນີນການຈົນກ່ວາການຮຽນຮູ້ດ້ວຍຕົນເອງສົບຜົນສໍາເລັດຫຼືຄວາມລົ້ມເຫຼວໄດ້ຖືກກະຕຸ້ນເຕືອນ. | ເບິ່ງຕາຕະລາງ 3 ສໍາລັບຄວາມລົ້ມເຫຼວຂອງການຮຽນຮູ້ດ້ວຍຕົນເອງ. ເລີ່ມຕົ້ນການຮຽນຮູ້ດ້ວຍຕົນເອງຄືນໃໝ່ຫຼັງຈາກການແກ້ໄຂບັນຫາ. ຖ້າການຮຽນຮູ້ດ້ວຍຕົນເອງປະສົບຜົນສໍາເລັດຫຼືລົ້ມເຫລວ, ກະລຸນາຕັ້ງ IECB ເປັນສະຖານະການປ່ຽນແປງຄວາມຖີ່. | |
ຕາຕະລາງ 7. ການແກ້ໄຂບັນຫາສໍາລັບການຮຽນຮູ້ດ້ວຍຕົນເອງທີ່ລົ້ມເຫລວ. ຖ້າການຮຽນຮູ້ດ້ວຍຕົນເອງລົ້ມເຫລວ, ກະລຸນາແກ້ໄຂບັນຫາຕາມລະຫັດຄວາມຜິດທີ່ສະແດງຢູ່ໃນເຄື່ອງແມ່ຂ່າຍ. ສໍາລັບການແກ້ໄຂບັນຫາລາຍລະອຽດ, ກະລຸນາເບິ່ງຕາຕະລາງ 7. ຫຼັງຈາກແກ້ໄຂບັນຫາ, ທ່ານຈໍາເປັນຕ້ອງໄດ້ຮຽນຮູ້ດ້ວຍຕົນເອງ.
| ເລກລໍາດັບ | ສະພາບຜິດປົກກະຕິ | ການສະແດງຜົນເຊີບເວີລົ້ມເຫລວ | ການແກ້ໄຂບັນຫາ |
| 1 | ສະພາບຜິດປົກກະຕິ ຄ່າ SP ບໍ່ຢູ່ພາຍໃນຂອບເຂດ 14-25HZ | SPF | ກວດເບິ່ງຄວາມໄວຂັ້ນຕອນ SPF ແລະຄວາມກວ້າງຂັ້ນຕອນໃນ M2-1-2-1, ແລະກວດເບິ່ງວ່າການຕິດຕັ້ງເຊັນເຊີ SP1 ແລະ SP2 ກົງກັບຄວາມຕ້ອງການຫຼືບໍ່ |
| 2 | ຄວາມແຕກຕ່າງລະຫວ່າງໄລຍະ AB (SP1 ແມ່ນໄລຍະ A, SP2 ແມ່ນໄລຍະ B) ບໍ່ແມ່ນລະຫວ່າງ 45°-135° | SPF | ກວດເບິ່ງວ່າການຕິດຕັ້ງເຊັນເຊີ SP1 ແລະ SP2 ກົງກັບຄວາມຕ້ອງການ |
| 3 | MSD1 ແຖວເທິງຂາດ | B25 | ກວດເບິ່ງວ່າເຊັນເຊີຂັ້ນຕອນເທິງໄດ້ຖືກຕິດຕັ້ງຢ່າງຖືກຕ້ອງ |
| 4 | ຂາດສາຍ MSD2 | B25 | ກວດເບິ່ງວ່າເຊັນເຊີຂັ້ນຕອນໄດ້ຖືກຕິດຕັ້ງຢ່າງຖືກຕ້ອງ |
| 5 | ການບ່ຽງເບນລະຫວ່າງຄ່າ HDR ແລະ HL ເກີນ 10% ຫຼືການປ່ຽນແປງຂອງກໍາມະຈອນເກີດຂຶ້ນໃນລະຫວ່າງຂະບວນການຮຽນຮູ້ດ້ວຍຕົນເອງ | B9 | ກວດເບິ່ງວ່າເຊັນເຊີທີ່ວາງແຂນທີ່ຖືກຕ້ອງຖືກຕິດຕັ້ງຢ່າງຖືກຕ້ອງ |
| 6 | ການບ່ຽງເບນລະຫວ່າງຄ່າ HL ແລະ HR ເກີນ 10% ຫຼືການປ່ຽນແປງຂອງກໍາມະຈອນເກີດຂຶ້ນໃນລະຫວ່າງຂະບວນການຮຽນຮູ້ດ້ວຍຕົນເອງ | B8 | ກວດເບິ່ງວ່າເຊັນເຊີທີ່ວາງແຂນຊ້າຍຖືກຕິດຕັ້ງຢ່າງຖືກຕ້ອງ |
8.3 ການທົດສອບຕົນເອງຫຼັງຈາກການຮຽນຮູ້ດ້ວຍຕົນເອງ CHK ສໍາເລັດ
ຫຼັງຈາກການຮຽນຮູ້ດ້ວຍຕົນເອງສໍາເລັດແລ້ວ, ໃສ່ປລັກທີ່ບໍ່ບໍາລຸງຮັກສາ, ໃຊ້ປຸ່ມກົດເພື່ອເລີ່ມຕົ້ນການເລື່ອນໄດ້ຕາມປົກກະຕິ, ແລະດໍາເນີນການທົດສອບຕົນເອງຂອງ escalator. ໃນລະຫວ່າງການປະຕິບັດການກວດສອບຕົນເອງ, escalator ຈະແລ່ນຕໍ່ເນື່ອງສໍາລັບ 2 ນາທີ. ໃນລະຫວ່າງ 2 ນາທີເຫຼົ່ານີ້, ການທໍາງານຂອງຕົນເອງເລີ່ມຕົ້ນຈະໄດ້ຮັບການປິດການຊົ່ວຄາວ, ແລະການປົກປ້ອງຄວາມຜິດພາດທັງຫມົດຂອງ escalator ໄດ້ຮັບການກວດສອບ. ຖ້າບໍ່ພົບຄວາມຜິດໃນລະຫວ່າງການກວດສອບຕົນເອງ, ມັນຈະກັບຄືນສູ່ການເຮັດວຽກປົກກະຕິໂດຍອັດຕະໂນມັດ. ບໍ່ຈໍາເປັນຕ້ອງ Restart escalator ໄດ້; ຖ້າພົບເຫັນຄວາມຜິດ, escalator ຈະຢຸດແລ່ນແລະສະແດງຄວາມຜິດທີ່ສອດຄ້ອງກັນ. ຄວາມຜິດທົ່ວໄປສາມາດພົບເຫັນຢູ່ໃນກໍາແພງພາຍໃນຂອງປະຕູຕູ້ຄວບຄຸມ. ຫຼັງຈາກການແກ້ໄຂບັນຫາ, ທ່ານຈໍາເປັນຕ້ອງກວດເບິ່ງຕົນເອງຄືນໃຫມ່. ປ່ອງປຸ່ມສະຫຼັບຈະສະແດງ CHK ສໍາລັບແຕ່ລະການກວດສອບດ້ວຍຕົນເອງ.
ທຸກໆຄັ້ງທີ່ມັນເຂົ້າສູ່ສະພາບປົກກະຕິຈາກສະພາບບໍາລຸງຮັກສາ, escalator ຈະເຂົ້າສູ່ສະຖານະການກວດກາຕົນເອງ. ໃນລະຫວ່າງຂະບວນການກວດກາຕົນເອງ, ປ່ອງສະຫຼັບກະແຈຈະ CHK ທໍາອິດແລະໄຟຈະລາຈອນຈະອອກໄປ.
ເວລາປະກາດ: ຕຸລາ 24-2023